로봇의 위치 추적 및 지도 작성 방법 [Simultaneous localization and map building method for robot]
페이지 정보
최고관리자 0 Comments 1 Views 20-11-10 15:46 기계본문
- 기술 정보
-
-
기술분야
가전
-
현재 권리자
삼성전자 주식회사
-
Main IPC
B25J 9/16
-
존속기간 만료예정일
2026-06-30
-
출원번호
(출원일)10-2006-0060994
(2006.06.30) -
등록번호
(등록일)10-0757937
(2007.09.05)
-
기술분야
- 기술개발 목적
- - 본 발명은 로봇이 잘 알려지지 않은 환경에서 위치추적하기 위해 위치 추적하면서 지도를 작성 하는 과정의 문제점을 해결하기 위해 창안된 것임 - 로봇은 주행하는 동안 미끄러짐 현상, 바퀴 직경의 변경 등 여러 원인에 의해 오차가 발생하는 문제가 있으며, 지도 작성을 위하여 정확한 위치추적이 보장되어야함 - 따라서, 빠른 시간 내에 지도 작성과 위치추적의 문제를 동시에 수행할 수 있는 방법이 필요함
- 기술의 효과
- - 본 발명의 로봇의 위치추적 및 지도작성 방법은 계산량을 CDKF를 이용하여 줄이고, 스테레오 영상의 특징점과 3차원 복원된 영상 내의 표식을 이용하여 로봇이 회전하더라도 특징점에 대한 구 별능력을 향상시켜 로봇의 위치추적 및 지도 작성을 보다 효율적으로 동시에 수행할 수 있음
- 적용 산업분야
-
서비스 로봇

*출처 : 이데일리 (2017.10.02)
- 시장규모 및 전망
-
서비스 로봇 시장은 2015년 68.3억 달러에서 연평균 23.6% 성장하여 2023년 371.8억 달러의 규모로 전망됨
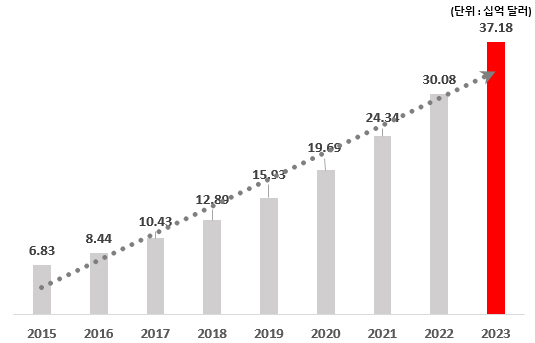
*출처 : 국제로봇연맹, 한국로봇산업진흥원, (주)SYP 재가공