의수 모듈
페이지 정보
최고관리자 0 Comments 1 Views 20-11-10 15:46 기계본문
- 분야 : 기타 개발상태 4 9
기술완성도
-
TRL09
사업화
- 본격적인 양산 및 사업화 단계
-
TRL08
시작품 인증/
표준화- 일부 시제품의 인증 및 인허가 취득 단계
- 조선 기자재의 경우 선급기관 인증, 의약품의 경우 식약청의 품목 허가 등
- 일부 시제품의 인증 및 인허가 취득 단계
-
TRL07
Pilot 단계 시작품
신뢰성 평가- 시작품의 신뢰성 평가
- 실제 환경(수요기업)에서 성능 검증이 이루어지는 단계
-
TRL06
Pilot 단계 시작품
성능 평가- 경제성(생산성)을 고려한, 파일로트 규모의 시작품 제작 및 평가
- 시작품 성능평가
-
TRL05
시제품 제작/
성능평가- 개발한 부품/시스템의 시작품(Prototype) 제작 및 성능 평가
- 경제성(생산성)을 고려하지 않고, 우수한 시작품을 1개~수개 미만으로 개발
-
TRL04
연구실 규모의
부품/시스템 성능평가- 연구실 규모의 부품/시스템 성능 평가가 완료된 단계
- 실용화를 위한 핵심요소기술 확보
-
TRL03
연구실 규모의
성능 검증- 연구실/실험실 규모의 환경에서 기본 성능이 검증될 수 있는 단계
- 개발하려는 시스템/부품의 기본 설계도면을 확보하는 단계
- 모델링/설계기술 확보
-
TRL02
실용 목적의 아이디어/
특허 등 개념 정립- 실용 목적의 아이디어, 특허 등 개념 정립
-
TRL01
기초 이론/
실험- 연구과제 탐색 및 기회 발굴 단계
- 기술배경
-
❍ 현재까지 개발된 의수의 경우, 손가락의 각 마디가 비-독립적으로 구동되기 때문에 물체의 형상에 따라 손가락의 굽힘 각도가 상이하게 제어되지 못함
❍ 물체의 형상에 따라 손가락의 굽힘 각도가 조절되는 어댑티브 모션(adaptive motion)이 제대로 구현되지 못하고 있다. 또한 손가락의 벌림(abduction) 및 손가락의 모음 (adduction) 동작도 제대로 구현되지 못하고 있기 때문에 의수의 경로가 자연스럽지 못하는 문제 존재
- 기술개요
-
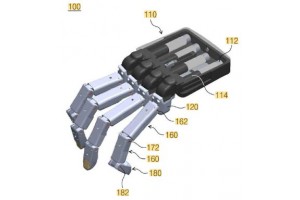
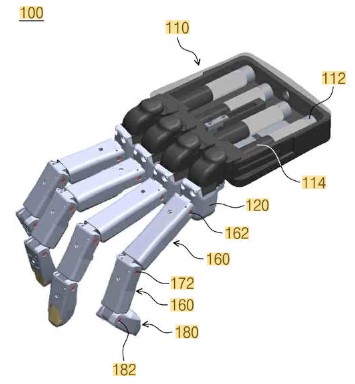
❍ 손가락에 대응되는 링크의 움직임이 보다 신체의 움직임에 근접하는 의수 모듈 제조
- 기술개요
-
❍ 모터의 회전력에 따라 회전하는 회전 축의 회전에 따라 장력이 조절되는 와이어 및 와이어와 연결되는 조인트 프레임을 포함함

120: 전달 프레임 122: 회전 축 130: 와이어 장력 조절부 140: 제2 와이어 장력 조절부
- 응용 및 활용분야
-
❍ 의수, 로봇 암
- 시장 동향 및 전망
-
❍ 세계 웨어러블 로봇 시장의 규모는 2020년 기준 319백만 달러로, 연평균 41.9% 성장하여 2025년 1,836백만 달러의 규모가 될 것으로 전망
❍ 국내는 2020년 기준 15백만 달러 규모에서 연평균 40.8% 성장하여 2025년 83백만 달러의 규모가 될 것으로 전망
[세계 및 국내 웨어러블 로봇 시장 규모 및 전망]
- 특장점
-
- ❍ 어댑티브 모션 구현과 손가락 링크들의 굽힘이 독립적으로 구현될 수 있음
❍ 손가락의 벌림 및 손가락의 모음, 파지력 조절, 탈부착이 가능
-
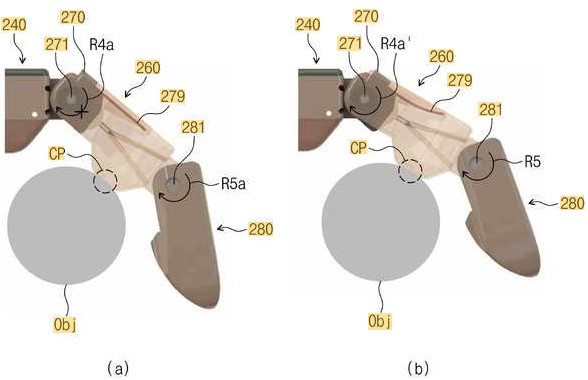
도 (a)는 제2 링크(260)가 R4a 방향으로 회동 중, 제2 링크(260)가 물체(Obj)와 접촉(CP) 함에 따라, 제2 링크가 더 이상 R4a 방향으로 회동하지 못하는 상황이 발생 도 (b)는 제2 링크(260)의 제2 바디(262)의 회동은 물체에 의하여 정지된 상태에서, 제2 바디(262)에 대하여 제2 조인트 프레임 (270)은 상대 회동 가능