[한국자동차연구원] 보행자 감지 및 충돌 회피 장치와 그 방법
페이지 정보
최고관리자 0 Comments 1 Views 20-11-10 15:46 기계본문
- 분야 : 기술제품 개발상태 5 9

기술완성도
-
TRL09
사업화
- 본격적인 양산 및 사업화 단계
-
TRL08
시작품 인증/
표준화- 일부 시제품의 인증 및 인허가 취득 단계
- 조선 기자재의 경우 선급기관 인증, 의약품의 경우 식약청의 품목 허가 등
- 일부 시제품의 인증 및 인허가 취득 단계
-
TRL07
Pilot 단계 시작품
신뢰성 평가- 시작품의 신뢰성 평가
- 실제 환경(수요기업)에서 성능 검증이 이루어지는 단계
-
TRL06
Pilot 단계 시작품
성능 평가- 경제성(생산성)을 고려한, 파일로트 규모의 시작품 제작 및 평가
- 시작품 성능평가
-
TRL05
시제품 제작/
성능평가- 개발한 부품/시스템의 시작품(Prototype) 제작 및 성능 평가
- 경제성(생산성)을 고려하지 않고, 우수한 시작품을 1개~수개 미만으로 개발
-
TRL04
연구실 규모의
부품/시스템 성능평가- 연구실 규모의 부품/시스템 성능 평가가 완료된 단계
- 실용화를 위한 핵심요소기술 확보
-
TRL03
연구실 규모의
성능 검증- 연구실/실험실 규모의 환경에서 기본 성능이 검증될 수 있는 단계
- 개발하려는 시스템/부품의 기본 설계도면을 확보하는 단계
- 모델링/설계기술 확보
-
TRL02
실용 목적의 아이디어/
특허 등 개념 정립- 실용 목적의 아이디어, 특허 등 개념 정립
-
TRL01
기초 이론/
실험- 연구과제 탐색 및 기회 발굴 단계
- 기술개요
-
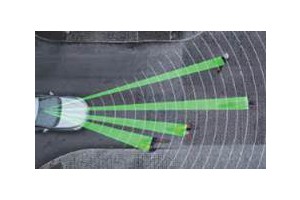
○ 본 기술은 이종센서의 조합을 통해 보행자(VRU)를 효과적으로 검지, 식별, 트래킹하여 정확한 충돌 위험을 판단 및 제동 수행을 통해 보행자(VRU)와의 충돌을 회피하거나 상해를 최소화 하기 위한 방법에 관한 것으로, 현재 상용화된 AEB 기술의 한계를 극복, 보완하여 시스템의 성능을 극대화 및 오작동을 최소화하는 것을 특징으로 함
- 기술개발배경
-
○ 최근 유럽에서는 자동차에 자동 위험감지 브레이크 시스템(AEB)을 의무적으로 장착하도록 지정하고 있으며, 차량과 보행자와의 충돌을 방지하기 위해서는 주/야간 혹은 악천후 상황에서도 보행자를 정확히 감지하고 보행자와의 거리를 검출하는 것이 가장 중요한 작업이라고 할 수 있음
- 기술활용분야
-
○ 전방 보행자(VRU) 센서 융합 기술, 충돌예방 시스템 기술, 자율주행자동차 사고 회피 기술
- 시장동향
-
○ 최근 EuroNCAP 의 AEB 평가 시행으로 급속히 시장이 확대될 것으로 전망(AEB car-to-car : 2 014, AEB VRU : 2016)
○ 보행자(VRU)의 적용 초기로 기술 안정화를 위한 기술개발 수요 증가 전망
- 기술구현
-
○ V2V 및 후방 충돌 상황을 고려한 충돌회피 기술
① 전방 센서를 통해 전방 보행자와 사각지대 보행자를 인식함
② Map 정보와 후방 정보를 통해 보행자 출현 가능성과 교통 상황을 인식하여 충돌 상황을 판단함
- 특장점
-
- 기존기술 한계
- ○ 레이더 및 카메라를 이용한 보행자 검지 및 제동 기술로 오인식에 따른 오작동 및 주행 환경 인식을 통한 충돌회피 알고리즘의 최적화 부족
- 개발기술 특성
- ○ 초음파, FIR, 레이더, Lidar 센서와 맵정보를 융합하여 최적화된 장애물 검지와 충돌 판단 알고리즘 도출
○ V2V 및 후방 충돌 상황을 고려한 충돌회피 기술로 종합적인 교통 상황을 고려한 자율주행 기술에 접목 가능