스테레오 영상처리 시스템
페이지 정보
최고관리자 0 Comments 1 Views 20-11-10 15:46 기계본문
- 분야 : 전자~전기 개발상태 4 9
기술완성도
-
TRL09
사업화
- 본격적인 양산 및 사업화 단계
-
TRL08
시작품 인증/
표준화- 일부 시제품의 인증 및 인허가 취득 단계
- 조선 기자재의 경우 선급기관 인증, 의약품의 경우 식약청의 품목 허가 등
- 일부 시제품의 인증 및 인허가 취득 단계
-
TRL07
Pilot 단계 시작품
신뢰성 평가- 시작품의 신뢰성 평가
- 실제 환경(수요기업)에서 성능 검증이 이루어지는 단계
-
TRL06
Pilot 단계 시작품
성능 평가- 경제성(생산성)을 고려한, 파일로트 규모의 시작품 제작 및 평가
- 시작품 성능평가
-
TRL05
시제품 제작/
성능평가- 개발한 부품/시스템의 시작품(Prototype) 제작 및 성능 평가
- 경제성(생산성)을 고려하지 않고, 우수한 시작품을 1개~수개 미만으로 개발
-
TRL04
연구실 규모의
부품/시스템 성능평가- 연구실 규모의 부품/시스템 성능 평가가 완료된 단계
- 실용화를 위한 핵심요소기술 확보
-
TRL03
연구실 규모의
성능 검증- 연구실/실험실 규모의 환경에서 기본 성능이 검증될 수 있는 단계
- 개발하려는 시스템/부품의 기본 설계도면을 확보하는 단계
- 모델링/설계기술 확보
-
TRL02
실용 목적의 아이디어/
특허 등 개념 정립- 실용 목적의 아이디어, 특허 등 개념 정립
-
TRL01
기초 이론/
실험- 연구과제 탐색 및 기회 발굴 단계
- 주요기술구성
-
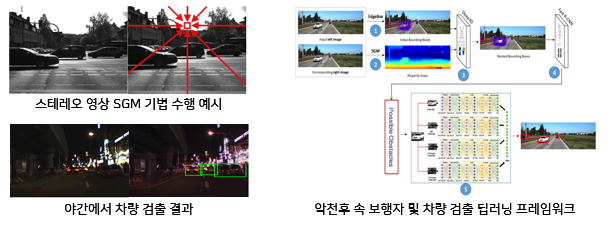
▶ 본 기술은 악천후 환경에서 적용 가능한 보행자 및 차량 인식 및 검출 딥러닝 기술에 관한 것임
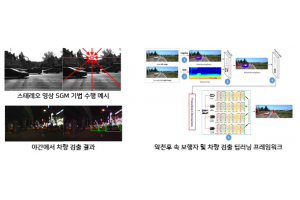
▶ (SGM 기법을 사용해 정확도와 속도가 향상된 스테레오 영상처리 시스템 개발) 지역기술과 전역기술이 가진 장점을 보유하고 단점을 보완한 알고리즘 기술, 정확도를 높이기 위해 그룹을 나누어, 그룹별로 시차 맵을 생성하고, 생성된 시차 맵을 기준으로 최종 시차 맵 생성
▶ (악천후 환경에서도 영상 학습정보를 수집하는 딥러닝 시스템 기술) 제한된 영역에 대한 딥러닝을 수행함으로써 영상에서 객체를 인식하는 속도가 향상됨
▶ (자율주행 자동차가 스스로 주변 환경을 인식하고 위험을 판단할 수 있는 기술) 여러 대의 카메라를 차량에 장착해 차선 인식, 신호등 및 표지판 인식 등 수행 가능한 기술
- 적용분야 및 적용제품
-
▶ 딥러닝 기반 알고리즘 자율 주행차량
▶ CCTV를 통한 보행자 추적
▶ 교통 데이터 분석 및 교통 수신호 인식, 경찰관 및 교통안전요원 검출 및 위치파악 등 교통정보 서비스
- 시장동향
-
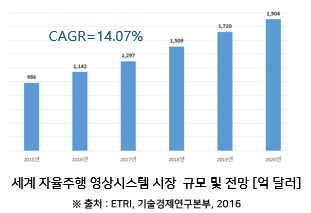
▶ 전 세계 자율주행차 시장규모는 2020년 71억 달러에서 2035년에는 157배 규모인 1조 1,204억 달러 규모로 연평균 40.13%씩 높은 성장률을 보일 전망이며, 자율주행을 위한 영상시스템의 세계 시장 규모는 2015년 986억 달러에서 2020년에는 1,904억 달러로 연평균 14.07% 성장률을 보일 전망임
▶ 국내 자율주행 영상시스템의 규모는 2015년 90억 달러 규모에서 2020년에는 176억 달러 규모로 연평균 14.35%의 성장률을 보일 전망임
- 특장점
-
- 기존 기술의 문제점
- ▶ 기존 기술은 이종 카메라를 사용하여 획득한 영상과 같이 불완전하게 교정되거나, 교정되지 않은 영상에 대해선 정확한 시차 맵을 생성하기 어려움
▶ 기존 딥러닝 시스템은 단일 카메라 영상 만을 이용하여 학습, 입력 영상 전체에 대한 딥러닝을 수행하지 않고, 제한된 영역에 대한 딥러닝을 수행함으로써 영상에서 객체를 인식하는 속도가 향상됨
- 기존 기술과의 차별성
- ▶ 제한된 영역에 대한 딥러닝을 수행함으로써 객체 인식속도가 향상되어 정확한 시차 맵 생성 가능
▶ 두 대의 카메라를 이용한 딥러닝 학습 시스템으로, 악천 후 속에서도 새로운 스테레오 매칭 기술 및 정보를 추출할 수 있어 보행자 및 차량을 인식 가능한 장점이 있음